-
A. Gfrerrer and J. Lang.
Fully variable valve control: A geometric approach.
J. Geometry Graphics 22/1 (2018), 99-114.
-
J. Kraxner, M. Schäfer, O. Röschel, G. Kothleitner, G. Haberfehlner, M.
Paller, and W. Grogger.
Quantitative EDXS: In fluence of geometry on a four detector system.
Ultramicroscopy 172 (2017), 30-39.
[doi].
-
A. Gfrerrer and J. Lang.
Geometry and
kinematics of a convertible's rear side window.
J. Geom. Graph. 20/1 (2016), 101-114.
[MR].
-
O. Röschel.
Overconstrained mechanisms based on special planar chains.
In Proc. 16th Int. Conf. Geometry and Graphics, pages 903-911. 2014.
Innsbruck, August 4--6.
-
O. Röschel.
Overconstrained mechanisms based on planar four-bar-mechanisms.
Computer Aided Geometric Design 31 (2014), 595-601.
[doi].
-
P. Fazekas, O. Röschel, and B. Servatius.
The kinematics of a
framework presented by H. Harborth and M. Möller.
Beitr. Algebra Geometrie 54/1 (2013), 201-209.
[doi].
-
M. Barton, L. Shi, M. Kilian, J. Wallner, and H. Pottmann.
Circular arc snakes
and kinematic surface generation.
Computer Graphics Forum 32/2 (2013), 1-10, Proc. Eurographics.
[doi].
-
O. Karpenkov, J. Schepers, and B. Servatius.
On
stratifications for planar tensegrities with a small number of vertices.
Ars Math. Contemp. 6 (2013), 305-322.
[arxiv: 1201.3557].
-
O. Röschel.
A Fulleroid-like mechanism based on the cube.
J. Geometry and Graphics 16 (2012), 19-27.
-
O. Röschel.
Overconstrained mechanisms based on trapezohedra.
In Proceedings of the 15th International Conference on Geometry and
Graphics (ICGG 2012), pages 629-637. 2012.
-
A. Gfrerrer.
Motion of a line segment whose endpoint paths have equal arc length.
In G. Weiss, editor, Int. Workshop on Line Geometry an Kinematics 2011,
pages 21-26. Dresden University of Technology, 2011, ISBN 978-3-86780-244-4.
-
O. Röschel.
An overconstrained chain of 16 regular triangles.
In G. Weiss, editor, Proceedings of the 1st International Workshop on Line
Geometry and Kinematics, pages 87-93. Dresden University of Technology,
2011, ISBN 978-3-86780-244-4.
-
A. Gfrerrer, J. Lang, A. Harrich, M. Hirz, and J. Mayr.
Car side window kinematics.
Computer-Aided Design 43 (2011), 410-416.
[doi].
-
P. Zsombor-Murray and A. Gfrerrer.
Mapping similarity between parallel and serial architecture kinematics.
Meccanica 46/1 (2011), 183-194.
[doi].
-
A. Harrich, J. Mayr, M. Hirz, P. Rossbacher, J. Lang, A. Gfrerrer, and A.
Haselwanter.
CAD-based synthesis of a window lifter mechanism.
SAE Technical Paper 2010-01-0009, 2010.
Proc. SAE World Congress, Detroit.
[doi].
-
O. Röschel.
The self-motions of a fulleroid-like mechanism.
In Proc. 14th Int. Conf. Geometry and Graphics, pages 1-7. 2010.
Kyoto, August 5--9.
-
P. J. Zsombor-Murray and A. Gfrerrer.
A unified approach to direct kinematics of some reduced motion parallel
manipulators.
J. Mechanisms Robotics 2 (2010), #,021006.
[doi].
-
F. Doray, O. Karpenkov, and J. Schepers.
Geometry of configuration spaces of tensegrities.
Discrete Comput. Geom. 43/2 (2010), 436-466.
[MR], [doi].
-
O. N. Karpenkov.
On the
flexibility of Kokotsakis meshes.
Geom. Dedicata 147 (2010), 15-28.
[MR], [doi].
-
A. Gfrerrer and P. J. Zsombor-Murray.
3R-wrist positioning - a classical problem and its geometric
background.
In A. Kecskemethy and A. Müller, editors, Proceedings of the 5th
International Workshop on Computational Kinematics, pages 175-182.
Springer, 2009, ISBN 978-3-642-01946-3.
[doi].
-
A. Gfrerrer.
Geometry and kinematics of the Mecanum wheel.
Comput. Aided Geom. Des. 25 (2008), 784-791.
[MR].
-
A. Gfrerrer.
Axial equiform Bricard motions.
Grazer math. Berichte 352 (2008), 17 - 40.
-
A. Hofmeister, W. Sextro, and O. Röschel.
Error-workspace analysis of plane mechanisms.
In Proc. EUCOMES, pages 1-12. 2006.
-
S. Mick and O. Röschel.
Frameworks generated by the octahedral group.
KoG 9 (2005), 3-10.
-
H. Wresnik.
Bewegungen mit ebenen Bahnen
im einfach isotropen Raum. Teil I.
Rad Hrvat. Akad. Znan. Umjet. Mat. Znan. 15 (2005), 23-47.
-
H. Wresnik.
Bewegungen mit ebenen Bahnen
im einfach isotropen Raum. Teil II.
Rad Hrvat. Akad. Znan. Umjet. Mat. Znan. 15 (2005), 49-71.
-
A. Gfrerrer and P. J. Zsombor-Murray.
Robotrac mobile 6R closed chain.
In Proc. CSME Forum, pages 21-24. 2002, ISBN 0-9730900-1-4.
CD.
-
O. Röschel.
New models of moveable polyhedra.
In V. Mykhailenko, editor, Proc. 10th Int. Conf. on Geometry and
Graphics, volume 1, pages 127-131. 2002.
-
J. Lang, S. Mick, and O. Röschel.
The
rigidity rate of positions of Stewart-Gough platforms.
J. Geom. Graph. 5/2 (2001), 121-132.
[MR].
-
O. Röschel.
Zwangläufig bewegliche Polyedermodelle. III.
Math. Pannon. 12/1 (2001), 55-68.
[MR].
-
A. Gfrerrer and P. J. Zsombor-Murray.
Kinematics of a two-legged manipulator with actuated spherical joints.
In Proc. 2nd Workshop Computational Kinematics. 2001.
held May 19-22 2001, Seoul.
-
A. Gfrerrer.
Study's kinematic mapping - a tool for motion design.
In J. Lenarcic and M. M. Stanisic, editors, Recent Advances in Robot
Kinematics, pages 7-16. 2000.
-
O. Röschel.
Möbius mechanisms.
In J. Lenarcic and M. M. Stanisic, editors, Advances in Robot
Kinematics, pages 375-382. Kluwer, 2000.
-
A. Gfrerrer.
On
the construction of rational curves on hyperquadrics.
Grazer Math. Berichte 340 (1999), 1-69.
[MR].
|
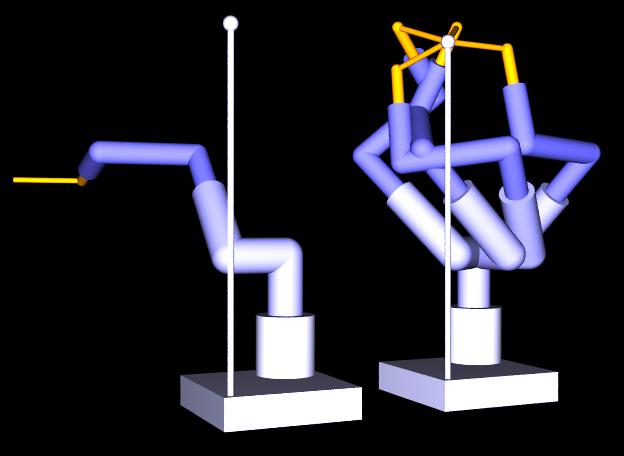 Research in this area deals with the geometry and kinematics of mechanisms with a focus on applications on the one hand, and theoretical
kinematicson the other hand. Applications are diverse and range from car
side windows to x-ray spectrometry.
Research in this area deals with the geometry and kinematics of mechanisms with a focus on applications on the one hand, and theoretical
kinematicson the other hand. Applications are diverse and range from car
side windows to x-ray spectrometry.